`report_card` guide
The report_card package
: currently due to missing
knowrob dependencies.
The report_card is a CRAM package that extends knowrob system and openEASE environment with functionality of generating a PDF file that contains easy to read (e.g. pie charts, bar charts, tables) robot experiment statistics.
Under the hood
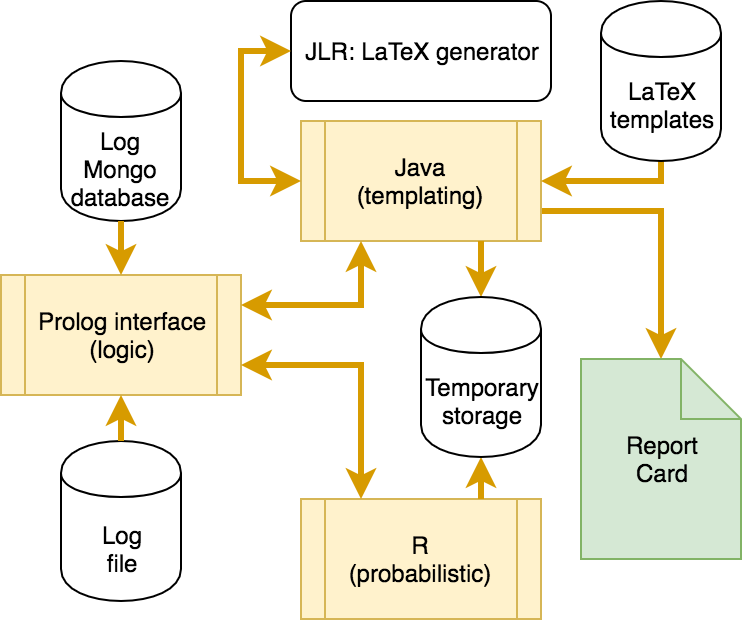
This package is based on Prolog and its interpreter - the main log analysis and computations are done therein.
Once the data is prepared part of it is passed to R via real interface where its processed and needed graphs are prepared. R is also used to store statistics and dump them into CSV and RData formats for easy post-processing.
Then, links to prepared figures and log statistics are passed via JPL to Java where they are prepared and injected into selected LaTeX templates with use of Nixo Soft JLR library.
Finally, the same library is used to generate a PDF based on prepared tex files. For details please refer to below figure.
Report card generation paradigm
To make the package the most universal the report card generation is based on two key concepts report card layout templates and section templates. This approach allows the user to choose the design of the report card and decide which sections should be placed within. Moreover, this design facilitates creating personalised section and including them in the report card without complex code alterations and rebuilding the whole package - see below.
layout
This templates specify overall design of the report card - please see report_card/report_card/tex_templates/reportCard.tex for an example. The most important part of it are \ifthenelse{ \equal{$section5}{} }{}{\input{$section5}} statements which include specified in Prolog sections. The default layout allows up to 10 sections.
sections
Section templates specify the structure of each section in the document - please see report_card/report_card/tex_templates/overview.tex for an example. There are 4 different types of variables that can be used in each section:
- $argument# - argument in which all LaTeX critical characters will be escaped - for use in normal text;
- $rawArgument# - argument which is not escaped - for use in verbatim environments and to pass file paths;
- $seqArguments# - sequences of arguments which are escaped;
- $rawSeqArguments# - sequences of arguments which are not escaped;
where # should be replaced with number 0 to 19 - currently up to 20 arguments of each type are allowed per section.
For details on using arguments in the LaTeX sections please consult JLR tutorial.
Adding custom section
To add your custom section to the report card please create a file named section_name.tex in the report_card/report_card/tex_templates directory. Use the arguments naming as described above - the order of the arguments is based on the order used in the Java call done within Prolog.
To generate your section from within Prolog add a new predicate to report_card/prolog/report_card.pl file:
generate_section_name(RcHomeOs, SectionPath) :-
Section = 'section_name',
code_to_get_all_statistics,
jpl_datums_to_array([YourVariable1, YourVariable2], Strings),
jpl_new('[Ljava.lang.String;', 0, RawStrings),
jpl_datums_to_array([YourOtherVariable11, YourOtherVariable12], SeqStrings1),
jpl_datums_to_array([YourOtherVariable21, YourOtherVariable22], SeqStrings2),
jpl_datums_to_array([SeqStrings1, SeqStrings2], SeqStrings),
jpl_new('[[Ljava.lang.String;', 0, RawSeqStrings),
jpl_call( 'org.knowrob.report_card.Generator', section, [RcHomeOs, Section, Strings, RawStrings, SeqStrings, RawSeqStrings], SectionPath).Where RcHomeOs is path to the temporary directory of current report card; Section is the section name (it MUST contain the exact name you gave to your section file without .tex extension), Strings and RawStrings are as described above and of type array of strings and finally, SeqStrings and RawSeqStrings are as described above and of type array of array of strings. If you have no data of specific type to be passed to the section creator you should generate empty array for the first two types e.g. jpl_new('[Ljava.lang.String;', 0, Strings) and empty array of arrays for latter two types e.g. jpl_new('[[Ljava.lang.String;', 0, SeqStrings).
Once your section generator is ready you either need to either alter the current report card generator or create your custom generator. You can also generate the report card manually: for details please see below.
Automated
To alter current generator please append your section to generate_report_card(card_type(default)) predicate as follows:
generate_report_card(card_type(default)) :-
% initialisation
rc_temporary_directory(RcTempDir),
create_directory(RcTempDir),
prolog_to_os_filename(RcTempDir, RcHomeOs),
% report card content
generate_overview(RcHomeOs, Introduction),
generate_actions(RcHomeOs, Actions),
generate_statistics(RcHomeOs, Statistics),
generate_failures(RcHomeOs, Failures),
generate_summary(RcHomeOs, Summary),
get_experiment_info(experimentId , TrialId),
%%%% custom content
generate_section_name(RcHomeOs, CustomSection),
jpl_datums_to_array([Introduction, Actions, CustomSection, Statistics, Failures, Summary], Strings),
%%%%
jpl_call( 'org.knowrob.report_card.Generator', rc, [RcHomeOs, TrialId, Strings], RcPdf),
% data exporting and information outputting
export_data(data_format(csv)),
export_data(data_format(r)),
write('Your report card is available at:\n'),
write(RcPdf), !.If you prefer to create custom report card generator first add type predicate to the already existing list: card_type(custom_card_type). and then create custom loader for created type:
generate_report_card(card_type(custom_card_type)) :-
% initialisation
rc_temporary_directory(RcTempDir),
create_directory(RcTempDir),
prolog_to_os_filename(RcTempDir, RcHomeOs),
get_experiment_info(experimentId , TrialId),
% report card content
generate_overview(RcHomeOs, Introduction),
generate_actions(RcHomeOs, Actions),
generate_statistics(RcHomeOs, Statistics),
generate_failures(RcHomeOs, Failures),
generate_summary(RcHomeOs, Summary),
%%%% custom content
generate_section_name1(RcHomeOs, Section1),
generate_section_name2(RcHomeOs, Section2),
generate_section_name3(RcHomeOs, Section3),
jpl_datums_to_array([Section1, Section2, Section3], Strings),
%%%%
jpl_call( 'org.knowrob.report_card.Generator', rc, [RcHomeOs, TrialId, Strings], RcPdf),
% data exporting and information outputting
export_data(data_format(csv)),
export_data(data_format(r)),
write('Your report card is available at:\n'),
write(RcPdf), !.Manual
To manually generate the report card (using Prolog shell) please use the following sequence:
rc_temporary_directory(RcTempDir), create_directory(RcTempDir), prolog_to_os_filename(RcTempDir, RcHomeOs), get_experiment_info(experimentId , TrialId), generate_section_name1(RcHomeOs, Section1), generate_section_name2(RcHomeOs, Section2), generate_section_name3(RcHomeOs, Section3), jpl_datums_to_array([Section1, Section2, Section3], Strings), jpl_call( 'org.knowrob.report_card.Generator', rc, [RcHomeOs, TrialId, Strings], RcPdf), export_data(data_format(csv)), export_data(data_format(r)).Before generating a report card remember to load the data e.g. load_experiment('/home/ros/datasets/ds4/cram_log.owl').!
Using R commands within Prolog
To perform statistical computations R is accessed via real interface in Prolog. As a rough guide please see the example shown below.
Set two lists in Prolog and pass them to R;
A = [1, 2, 3, 4, 5, 6],
B = ['a', 'b', 'c', 'd', 'e', 'f'],
a <- A,
b <- B,calculate mean of the first list, memorise the result in R variable and pass it back to Prolog;
'a.mean' <- mean(a),
Amean <- 'a.mean',
write(Amean),and finally, plot a pie-chart to PDF based on the list A with labels B.
<- pdf(file = +"./filename.pdf"),
<- pie('a', labels = sprintf(+"%s of\n%s", 'a', 'b'), main = +"Pie-chart name"),
<- invisible('dev.off()').Package requirements and installation
For details please refer to this location.
Contributions
Any section contributions are welcomed, please make a pull request with you custom report card generators predicates, report_card_type declarations, section.tex and all additional predicates extending report_card.pl.
Please document all your code and wrap it between %%%%section_name - author - <%%%% and %%%%section_name - author - >%%%%.